
CroSTAta: Cross-State Transition Attention Transformer for Robotic Manipulation
Paper • 2510.00726 • Published
CroSTAta introduces a novel State Transition Attention (STA) mechanism designed to improve robotic manipulation tasks by better capturing temporal dependencies and state transitions in sequential data. It enables policies to adapt behavior based on execution history, particularly in failure and recovery patterns.
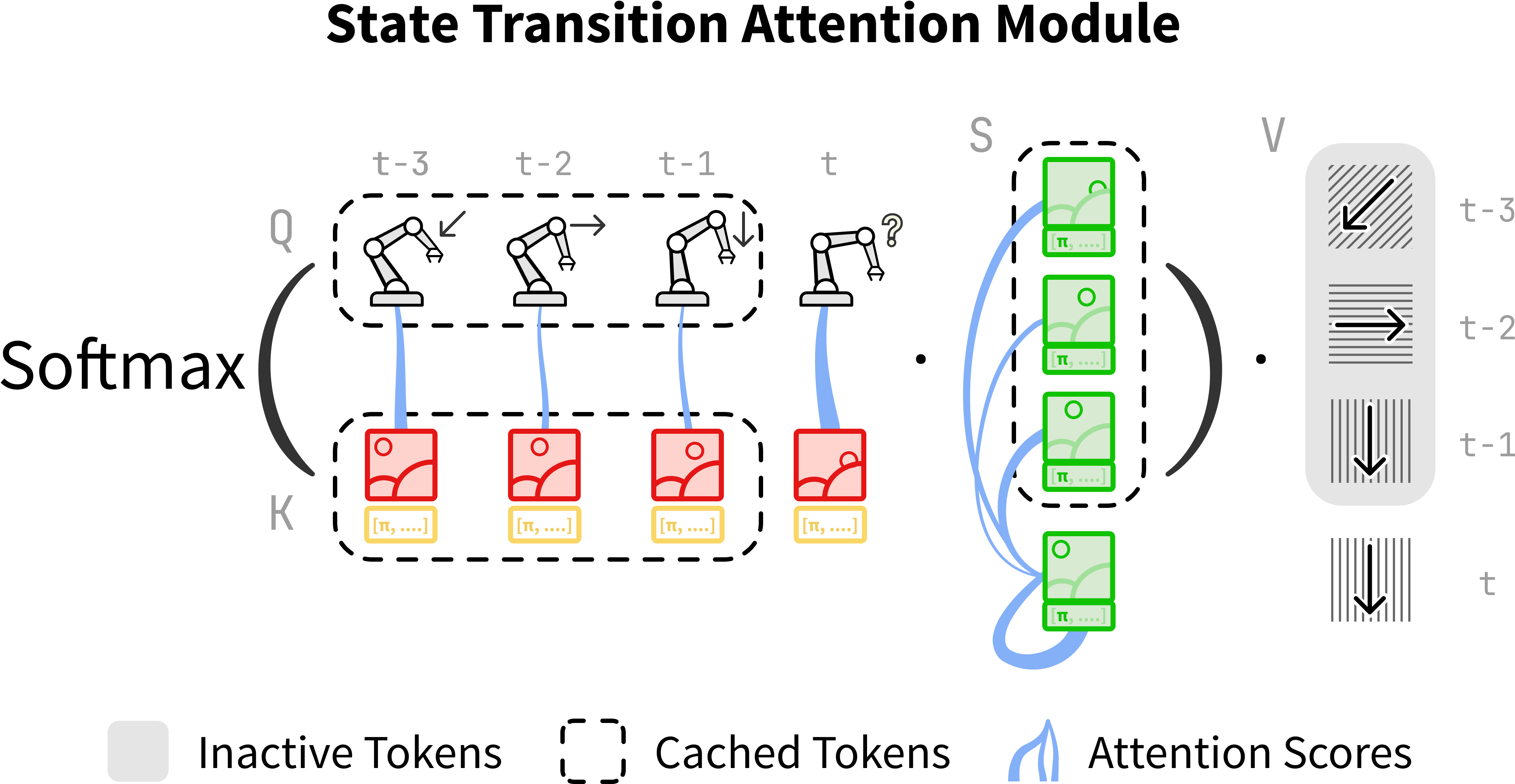
The Cross-State Transition Attention Transformer modulates standard attention weights based on learned state evolution patterns. This approach is combined with temporal masking during training to encourage temporal reasoning from historical context, achieving more than 2x improvement over standard cross-attention on precision-critical tasks.
git clone https://github.com/iit-DLSLab/croSTAta.git
cd croSTAta/
pip install -r requirements.txt
To train the model on a specific environment (e.g., PegInsertionSide-v1) using ManiSkill:
python train.py --task PegInsertionSide-v1 --envsim maniskill --num_envs 1 --val_episodes 100 --agent Maniskill/maniskill_sl_inference_cfg --device cuda --sim_device cuda
To evaluate a saved checkpoint:
python predict.py --task PegInsertionSide-v1 --envsim maniskill --num_envs 1 --val_episodes 100 --agent Maniskill/<cfg_file> --device cuda --sim_device cuda --resume --checkpoint save/<model_name>
Note: sl_agent inference uses by default the policy's method predict_batch (batch prediction). For efficient inference, use the policy's method predict (prediction with cache).
The model was evaluated using specific recovery datasets available on the Hugging Face Hub:
@article{minelli2025crostata,
title={CroSTAta: Cross-State Transition Attention Transformer for Robotic Manipulation},
author={Minelli, Giovanni and Turrisi, Giulio and Barasuol, Victor and Semini, Claudio},
year={2025}
}